




48:37
publiée le 10 juin 2026
Gaussian Volume Functional, Integral Scalar Curvature, and Minimal Super-Ricci Flows
De Karl-Theodeor Sturm
![[1955] Les notes fondamentales des surfaces hyperboliques aléatoires de grand genre](/media/cache/video_light/uploads/video/SeminaireBourbaki.png)
publiée le 9 juin 2026
[1955] Les notes fondamentales des surfaces hyperboliques aléatoires de grand genre
De Bram Petri
40:18
publiée le 26 mai 2026
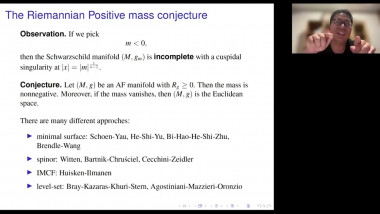
A proof of Riemannian positive mass theorem up to dimension 19
De Jintian Zhu