




01:26:21
publiée le 26 mai 2026
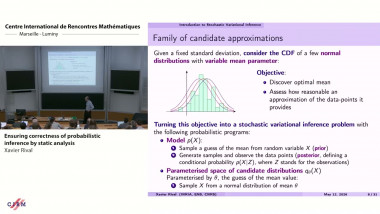
Ensuring correctness of probabilistic inference by static analysis
De Xavier Rival

publiée le 19 mai 2026
Finite capture and the closure of roots of restricted polynomials
De Bernat Espigule
01:28:59
publiée le 1 juillet 2025
Generative AI and Diffusion Models: a Statistical Physics Analysis (3/3)
De Giulio Biroli
